Flash Player 9.0.124 required.
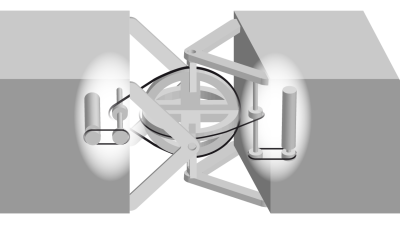
joint
Our robot traloc consists of five elements which are linked by joints.
Therefore a strong and flexible joint mechanism is indispensable
to move through the debris. In our focus project, we developed an innovative
mechanism based on the principle of a cardan joint that is able to generate
high forces and reaches a bending angle of up to 50 degrees between two elements.
The two degrees of freedom are mechanically decoupled and each of them is
steered independently by a motor. That is why each element includes two
motors that transmit their force with a gear and two chain drive stages
on the joint.